Liberating Asteroseismic Inversions from the Tyranny of Stellar Modelling
ISSI-BJ, April 16 2026
Modelling with Seismology gives Precision and Ages


Hare “Zebedee”, Cunha+ (2021)

Using \Delta\nu and \nu_\mathrm{max} only
Precise measurements of field stars: {\sigma_R \over R} \lesssim 2 \%;\ {\sigma_M \over M} \lesssim 5 \%;\ \sigma_\text{Age} \lesssim 0.4\ \mathrm{Gyr}
All models are wrong,
but some are useful.
— George E. P. Box

Data: y_\text{obs} \in Y
Models: x_i \in X;F: X \to Y

Best-fitting model: x = \mathop{\mathrm{argmax}}_{x_j \in X}\mathcal{L}\left(x_j\right)

F: \underbrace{\left(M, t, Y_0, Z_0, \alpha_\text{mlt}, \ldots\right)}_{x \in X} \mapsto \underbrace{\left(L, T_\text{eff}, [\text{M/H}], \log g, \ldots\right)}_{y \in Y}
/ /
/ /
/GARSTEC …
\color{darkorange} \to \Delta\nu, \nu_{\text{max}}, \left\{\nu_{n,\ell}\right\}

f-modes:
\omega_f \sim \sqrt{\left(\ell + {1\over
2}\right){GM\over R^3}}
↘
↑
p-modes: \omega_p \sim {\pi \over T}\left(n +
{\ell \over 2} + \epsilon_p\right)
Rotational inversions constrain differential rotation
(e.g. Yoshiki Hatta’s talk)

two standard
solar models
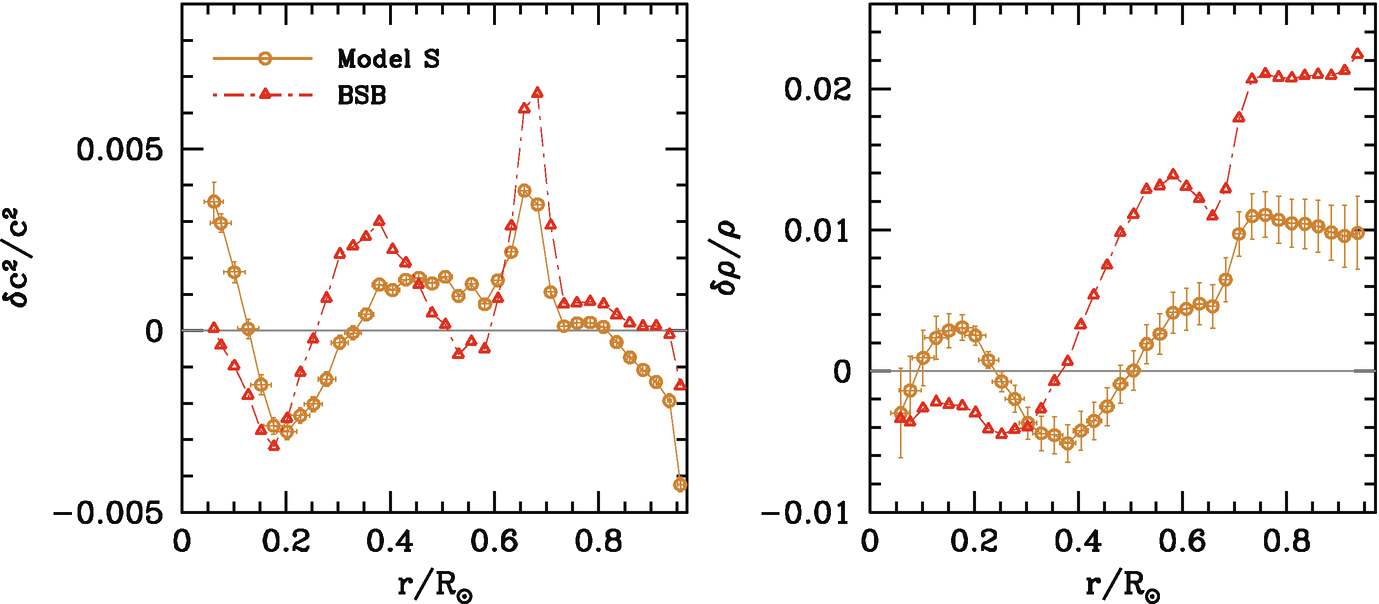
Structure Differences give Frequency Differences
S_{ij}[{\color{blue}{\rho}}, {\color{orange}c_s}] \equiv \int \bm\xi_i^*\cdot \left(\hat{\mathcal L} \bm \xi_j\right) \mathrm d^3 x \equiv \int L_{ij}\ \mathrm d r\ \ (= -\delta_{ij} \omega_i^2)
\delta S_{ij} = \int {\delta L_{ij} \over \delta \rho} {\color{blue}\delta\rho(r)}\mathrm d r + \int \underbrace{\delta L_{ij} \over \delta c_s}_{\mathclap{{\partial L_{ij} \over \partial c_s} - {\mathrm d \over \mathrm d r}{\partial L_{ij} \over \partial c_s'} + \ldots}} {\color{orange}\delta c_s(r)}\mathrm d r = V_{ij}
{\delta\omega_i \over \omega_i} = -{V_{ii} \over 2\omega_i^2} = \int K_{c_s,\rho,i}{\delta c_s \over c_s}\ \mathrm d r + \int K_{\rho,c_s,i}{\delta \rho \over \rho}\ \mathrm d r

We can* do this for ~30 other (cool MS) stars
Recipe:
- Model star well (expensive)
- Linearise perturbations around best-fit model (fragile)
- Invert for structure
(the easy part)
(e.g. Bellinger+ 2017, 2019; Pedersen+ 2018;
Vanlaer+ 2023; Buchele+ 2024)


Bellinger+ 2019
Buchele+ 2024
Relative difference in isothermal sound speed

* it’s hard
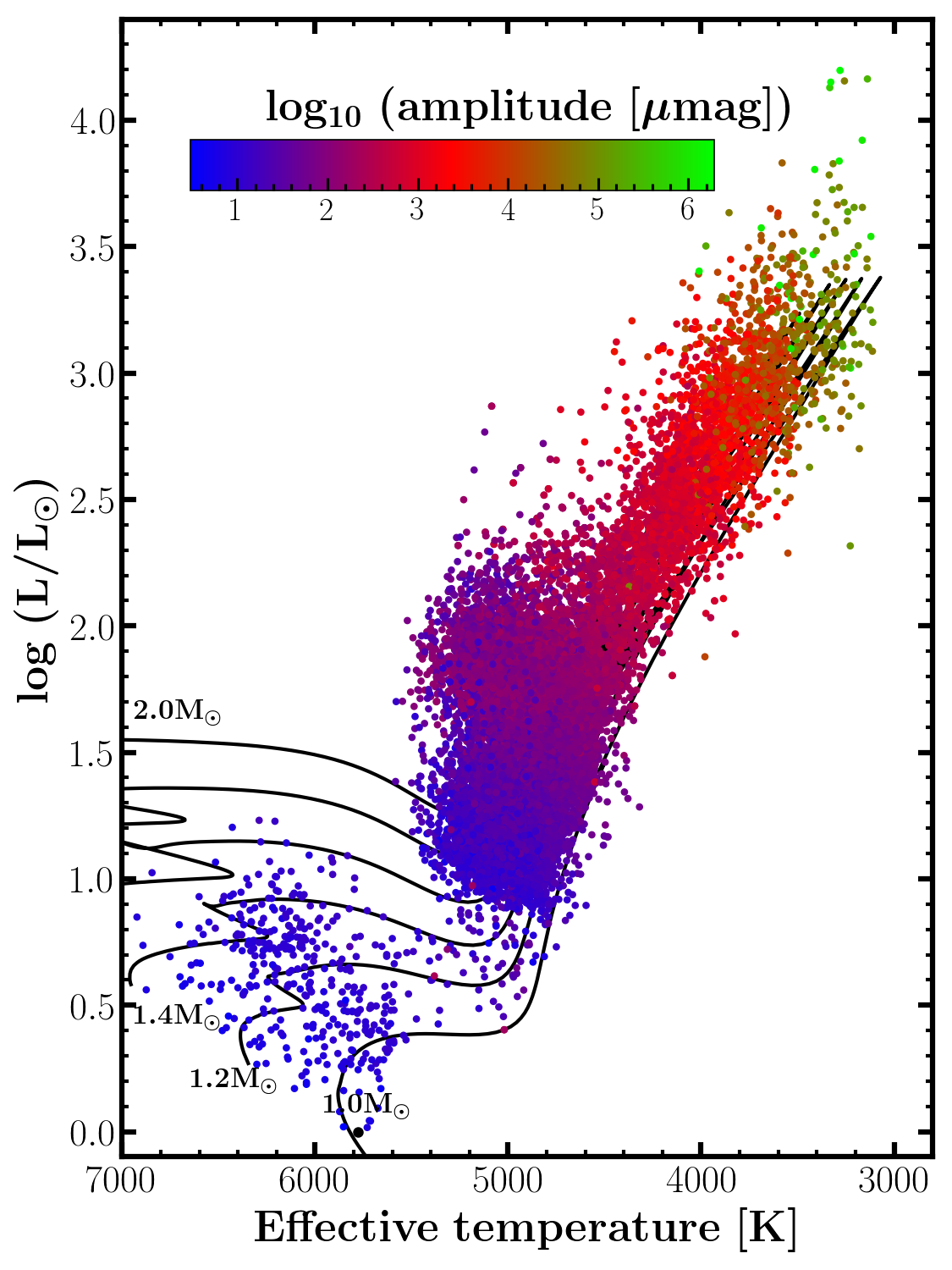
Evolved stars and classical pulsators dominate our asteroseismic sample.
(avoided
crossings can be decoupled:
Ong and Basu 2020)


We can only meaningfully compare dimensionless
quantities, scaled by combinations
of R and \omega_0 = \sqrt{G M \over R^3}.
Problem: We don’t (usually) know the mass and radius of a star in advance.
We needdon’t usually have accurate radii for this
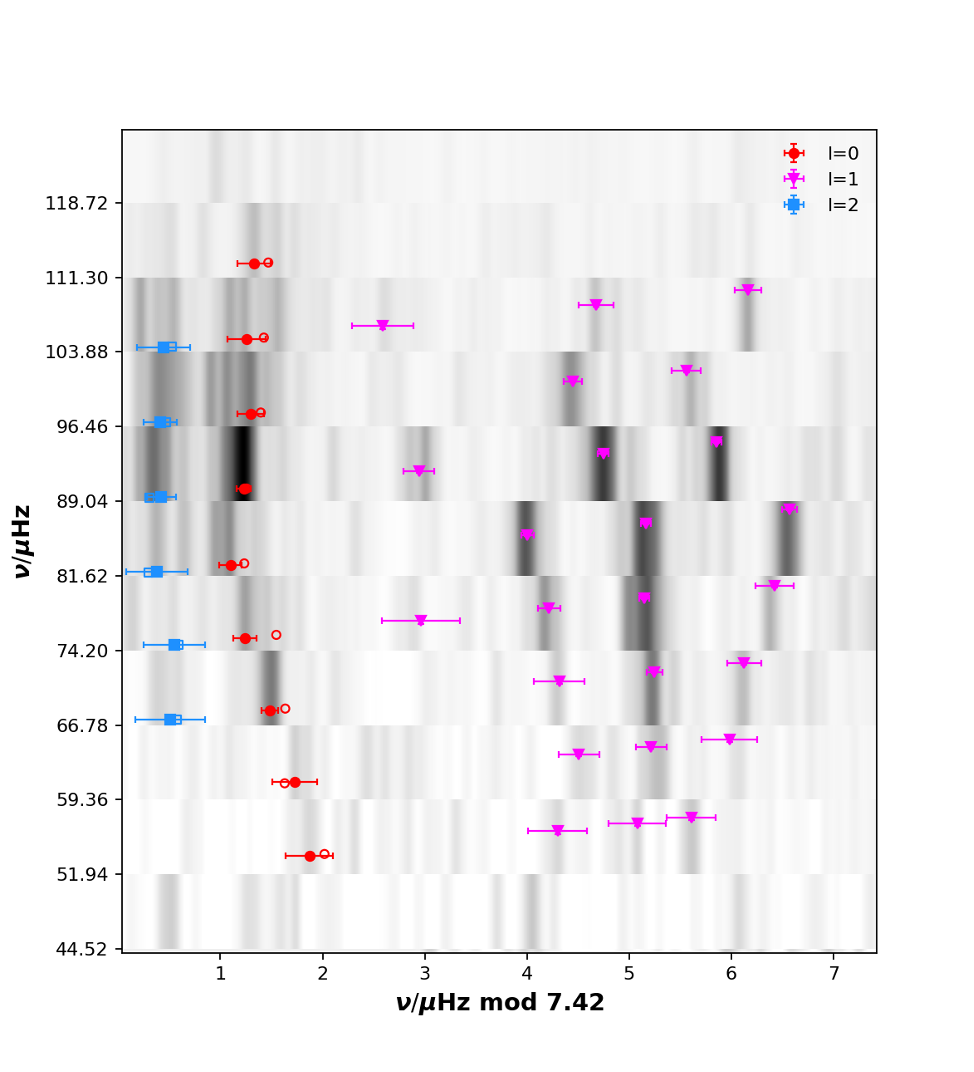

κ Cyg has TESS asteroseismology…
…and state-of-the-art CHARA interferometry.

Asteroseismic and Interferometric
radius estimates
do not agree.
(Chowhan et al, 2026)


Problem: Kernel shapes themselves depend on
structure!
(and are nonuniformly distributed)



From asymptotic analysis of p-modes, \xi_r \sqrt{\rho c_s r^2} \sim s_{\ell}(\omega t + \phi), where t(r) = \int_0^r \mathrm d r'/c_s is the acoustic radius and s_\ell(x) = \sqrt{\pi x \over 2} J_{\ell + {1\over2}}.
Proposal: Let’s choose t as the integration coordinate
(kernels for differences at matching t rather than r)

(similar analysis possible for g-modes)


(use for rotational inversions: Ong et al. 2024)

Highly similar kernels for very different radiistellar structures!
Blue =  ; Orange
=
; Orange
= 

Inversions now viable with kernels from models that are not exact matches to a star’s internal structure!


Perturbation
should remain linear over relatively large
evolutionary/mass range.